Candid Projectチーム12月の海外出張
顧客が新車向け先進運転支援システムをカスタマイズする際の重要な問題を解決できるよう支援するため、陳氏とプロジェクトチームは12月24日に顧客チームのもとへ飛びました。
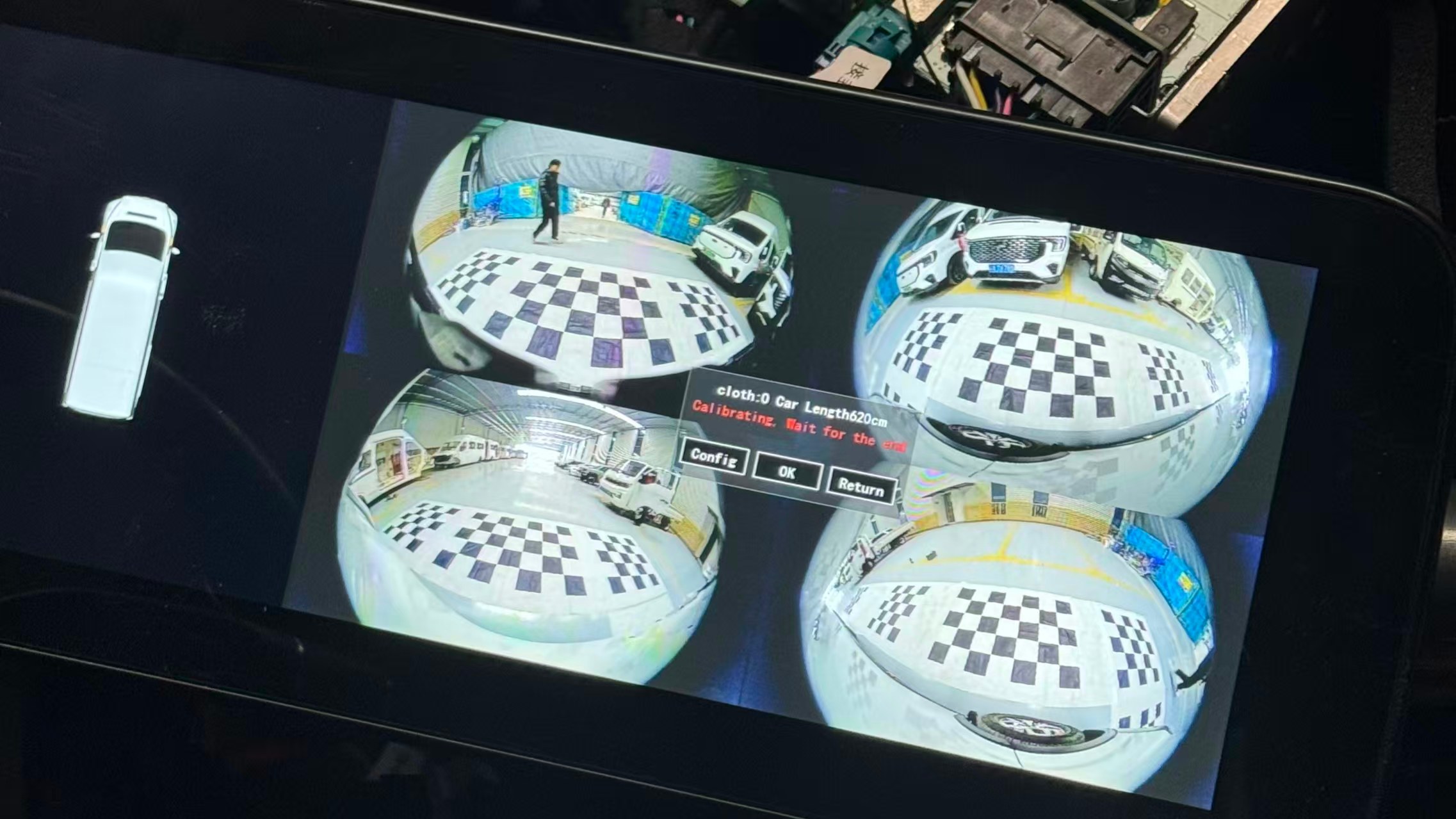
顧客と面会した後、チームは新車を視察しました。Candid は 360 度サラウンドビューとミリ波レーダーを車に提供し、車体データを取得する作業は Candid によって完了しました。
リバースエンジニアリング
グリッド部分

バックミラー部分

3Dレーザースキャナーを使用して車体をスキャンし、3次元輪郭データを取得します。これは、その後の360度パノラマ運転支援システムの開発に不可欠なデータです。
配線位置を確認する

360度パノラマ監視システムは、1台のホスト+ 4台のカメラで構成されています。初期段階では、後期段階で「非破壊設置」を確保するために、テールゲートと車のスクリーンを分解して適切な配線位置と設置方法を見つける必要があります。
オリジナルの車両CANデータを取得する

元の車両の CAN データを取得することは、サラウンド ビュー システムを元の車両の画面に接続するための最も重要なステップです。コックピット スイッチを繰り返しテストし、有効なデータ信号をフィルタリングすることで、サラウンド ビュー システムを自動的に起動できます。
新しいモデル向けの 360 度パノラマ画像システムの開発は、成熟したソリューション モデルと、舞台裏のプロジェクト チームの懸命な努力と切り離せません。